昨晚的理想AI Talk第二季直播中,李想火力全开,首度详解自主研发的VLA司机大模型,直言“自动驾驶正经历黎明前的黑暗”,并抛出多个重磅观点:
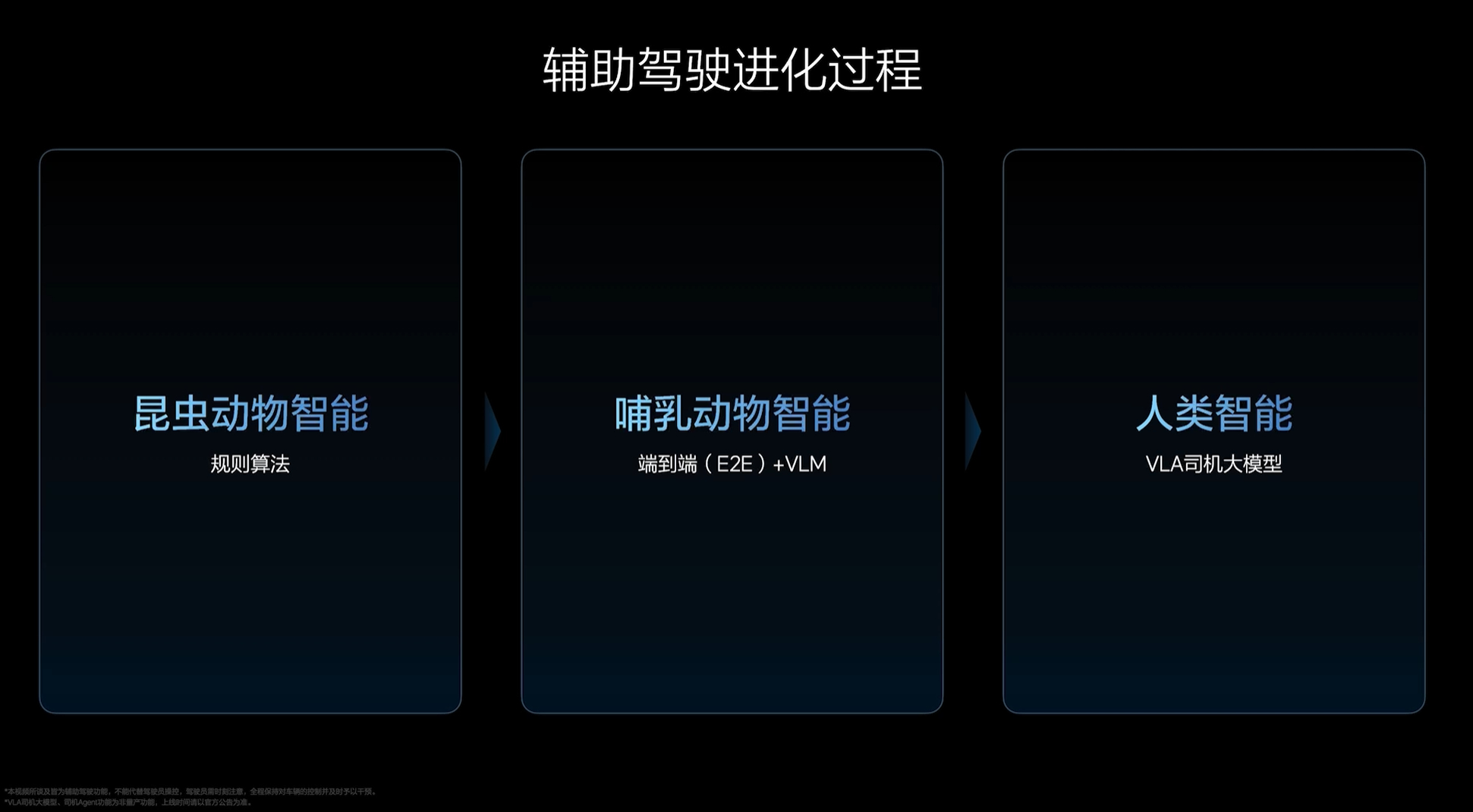
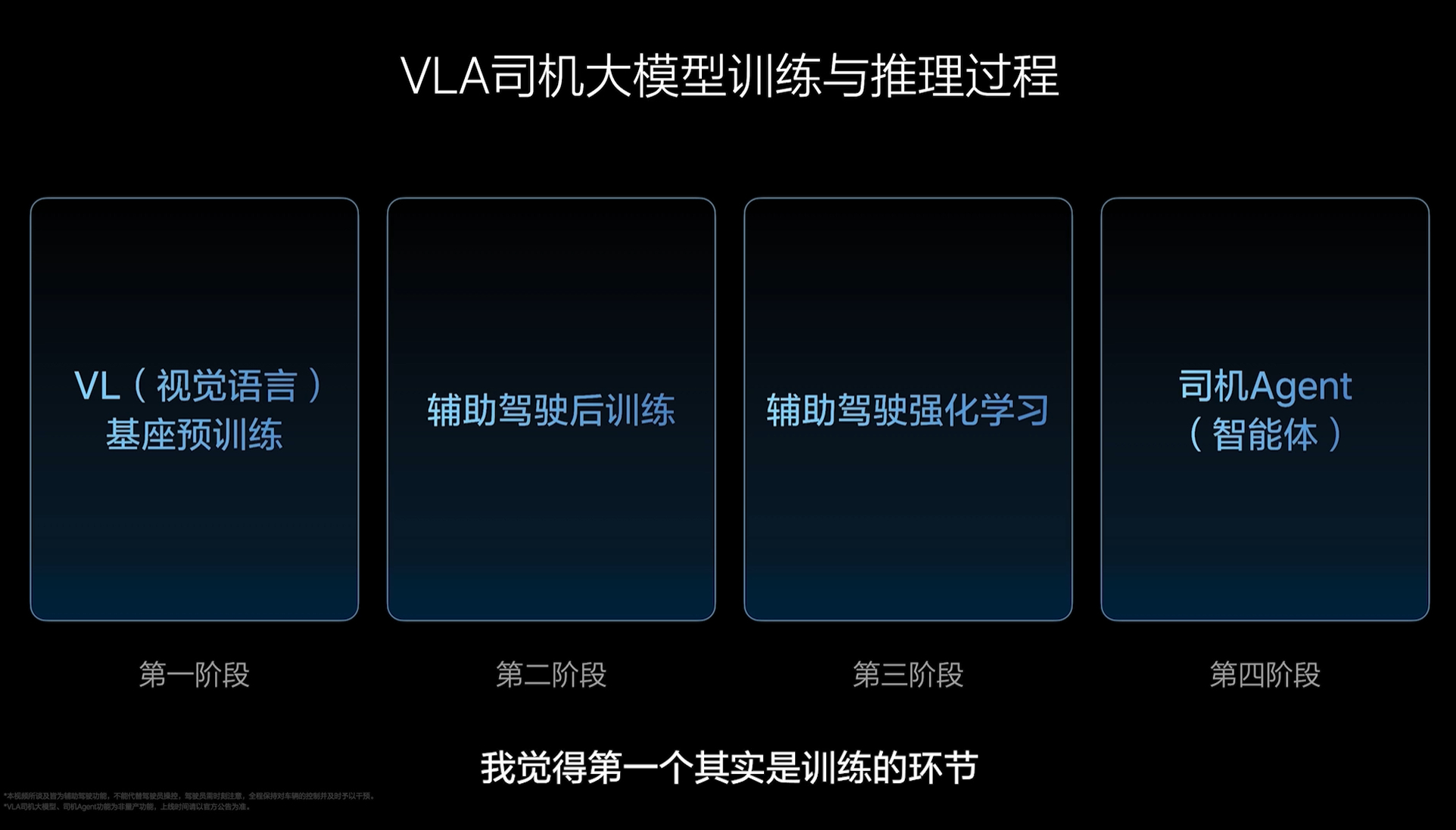
将VLA比作“从昆虫进化到人类司机”,分三阶段训练:
预训练:让AI学习物理世界常识,啃下3D视觉、高清图像和交通语义数据
后训练:加入动作数据,模拟驾校实操,用短思维链快速决策,比如遇到加塞时“减速避让但不急刹”的博弈能力
强化训练:通过人类反馈和世界模型仿真,确保AI司机“不路怒”“不加塞”,甚至比老司机更守规矩
面对“为何不用纯视觉方案”的质疑,李想直接开怼:“深夜高速上大货车尾灯坏了,激光雷达200米探测距离能救命!”并称特斯拉若在中国跑夜路,马斯克也会装雷达。
对于未来的辅助驾驶方向,更是直接放出暴论表示要么做端到端,要么别玩,直言传统规则算法是“死胡同”:“解决一个极端场景,又冒出三个新问题,团队一辈子都在填坑!”而理想选择端到端+VLM(视觉语言模型)双系统,模仿人脑“直觉+思考”模式,实现无地图全场景智驾。
李想预测,VLA成熟后,用户可像雇司机一样订阅AI驾驶服务,成本仅为人类的1/5。理想智驾的野心不仅是技术领先,更是重构“人车关系”。当AI从工具升级为“生产力”,你的方向盘还舍得自己握吗?鸭哥聊车理想AI Talk第二季李想谈辅助驾驶到了新十字路口